
Mit den Augen eines Roboters
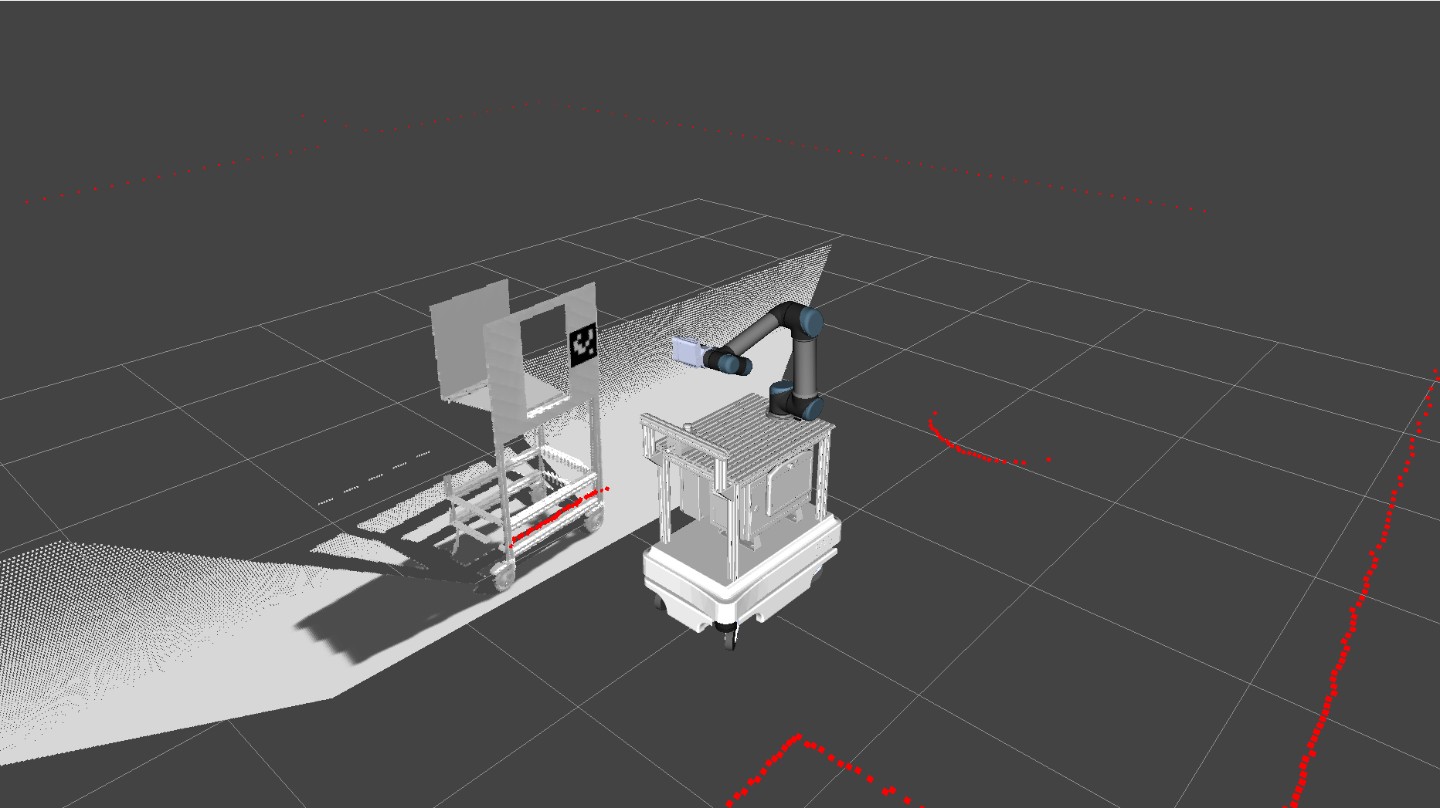
Die Weltsicht des Roboters: Die roten Punkte entsprechen der Wahrnehmung der zwei Laserscanner, die weißen Geometrien sind Teile einer Versuchsumgebung aus Sicht der Tiefenkamera am Roboterarm.
Der Wunsch, Anlagen flexibel für unterschiedliche Produkte zu nutzen, bringt starre Automatisierungslösungen zunehmend an ihre Grenzen. Daraus ergeben sich neue Bedarfe: Einerseits müssen Robotersysteme befähigt werden, eigenständig mit Variationen in Form und Lage von Bauteilen umzugehen. Andererseits muss auch der Materialfluss innerhalb einer Fabrik vermehrt dynamisch auf Aufträge reagieren können. Eine Verkettung über Förderbänder steht dabei den schnellen Änderungen von Prozess- und Produktionslayout im Weg. An ihre Stelle treten autonome Fahrzeuge, die im Idealfall eine auftragsindividuelle Verkettung der Systeme ermöglichen.
Sich einander anpassen
Der am Fraunhofer IPK entwickelte Tend-OBot bedient diese Bedarfe wirkungsvoll: Das System kombiniert ein autonomes Fahrzeug und einen darauf integrierten Roboterarm. In Verbindung mit Algorithmen der Bildverarbeitung und Bahnplanung wird daraus ein System, welches eigenständig mit Maschinen interagieren und sie beladen kann. Doch so einschlägig diese Lösung auch erscheinen mag, stellt sie hohe Anforderungen an die sensorischen und kognitiven Fähigkeiten des Systems.
Umgebungen, in denen Menschen und Roboter zusammenarbeiten, weisen eine hohe Komplexität auf. Um in diesem Umfeld zu bestehen, muss ein Roboter lernen, sich an die dynamische menschliche Umgebung anzupassen: Beispielsweise kann ein Mensch ein Werkzeug nach einem Arbeitsschritt zur Seite legen anstatt zurück an den ursprünglichen Verwahrort, weil es so gerade bequemer ist. Für einen Roboter kann ein solches fehlplatziertes Objekt, aber auch der Mensch selbst zu einem Hindernis werden. Ohne »Augen« und Intelligenz kollidiert er im Zweifel damit oder greift ins Leere. Aber auch der Montageprozess stellt neue Herausforderungen an den Roboter. Angelehnt an menschliche Fähigkeiten, muss auch ein Roboter feinfühliger und feinmotorischer werden, um die Montage komplexer Baugruppen robust ausführen zu können. Eine derartige Erweiterung der Fähigkeiten des Roboters erfordert komplexe Algorithmen, die Modelle und Sensordaten auswerten, um über verschiedene Strategien geeignete Handlungsanweisungen an den Roboter zu senden. Um dieses komplexe Zusammenspiel nachzuvollziehen, ist für die Entwicklerin oder den Entwickler zunächst eine Intuition über die Weltsicht des Roboters notwendig. Das Bild oben zeigt Einblicke in die Welt, wie der Roboter sie wahrnimmt. In Kombination mit Simulationen der Umgebung ermöglichen die im Rahmen des Projekts »Tend-O-Bot« erschlossenen Systeme, komplexe Aufgabenstellungen in einer digitalen Umgebung zu erproben und die Integration in den realen Prozess zu beschleunigen.

Hoch in die Cloud
Wie die Visualisierung der Daten zeigt, bauen die Algorithmen auf einer Vielzahl von komplexen Daten auf. Das Fahrzeug liefert über zwei Laserscanner Informationen über die Umgebung, eine Kamera am Roboter liefert ein Tiefenbild und eine weitere Kamera am Fahrzeug ein 2D-Bild in Fahrrichtung. All diese Informationen werden ausgewertet, um dem Roboter Rückschlüsse über die Situation zu erlauben. Eine solche Bandbreite an Algorithmen setzt eigentlich eine leistungsstarke Rechenhardware voraus. Da das System jedoch autonom und mobil operiert, wodurch Platz sowie Batteriekapazität beschränkt sind, wird die Ausführung der Rechenoperationen in die Cloud verlagert. Das System ist dafür komplett modular aufgebaut, sodass einzelne Anwendungen und Algorithmen annähernd beliebig im Netzwerk verschoben werden können. Eine leistungsstarke Funkverbindung übermittelt die Sensordaten dafür an die externen Server. Dort werden die Daten ausgewertet, das Weltverständnis des Roboters aktualisiert und anschließend neue Befehle an die Hardware übermittelt.
Die Fähigkeit des Tend-O-Bot-Systems, eigenständig und schnell auf neue Situationen zu reagieren, ist ein zentraler Baustein für jede flexible Mensch-Roboter-Kollaboration (MRK). Durch den modularen Aufbau können einzelne Bildverarbeitungs- und Planungsalgorithmen auch getrennt voneinander verwendet werden. Die Kopplung der Systeme erfolgt über die digitale Zwischenebene, so dass auch neue Sensoren und Algorithmen mit geringem Aufwand in die bestehenden Lösungen integriert werden können. So lassen sich kundenindividuelle Ideen schnell umsetzen. Vorstellbar ist auch der Einsatz mehrerer Fahrzeuge, um Prozesse flexibel in einem Matrixverbund miteinander zu vernetzen. Durch den integrierten Manipulator erlaubt das System dabei auch die Interaktion mit Maschinen, welche schwer über klassische Transportsysteme erschlossen werden können. Der Tend-O-Bot greift in diesem Fall selbst ein und belädt die Maschine eigenständig.
Langfristig ermöglichen die Algorithmen zudem, dass die Robotik aus der industriellen Domäne ausbricht: Einsatzorte im Einzelhandel sowie in der Agrar- und Bauindustrie sind zukünftig möglich. Im Gegensatz zu den zumindest teilweise strukturierten Umgebungen industrieller MRKAnwendungen wird es hier jedoch noch einmal höhere Anforderungen an die kognitiven Fähigkeiten der Roboter geben.