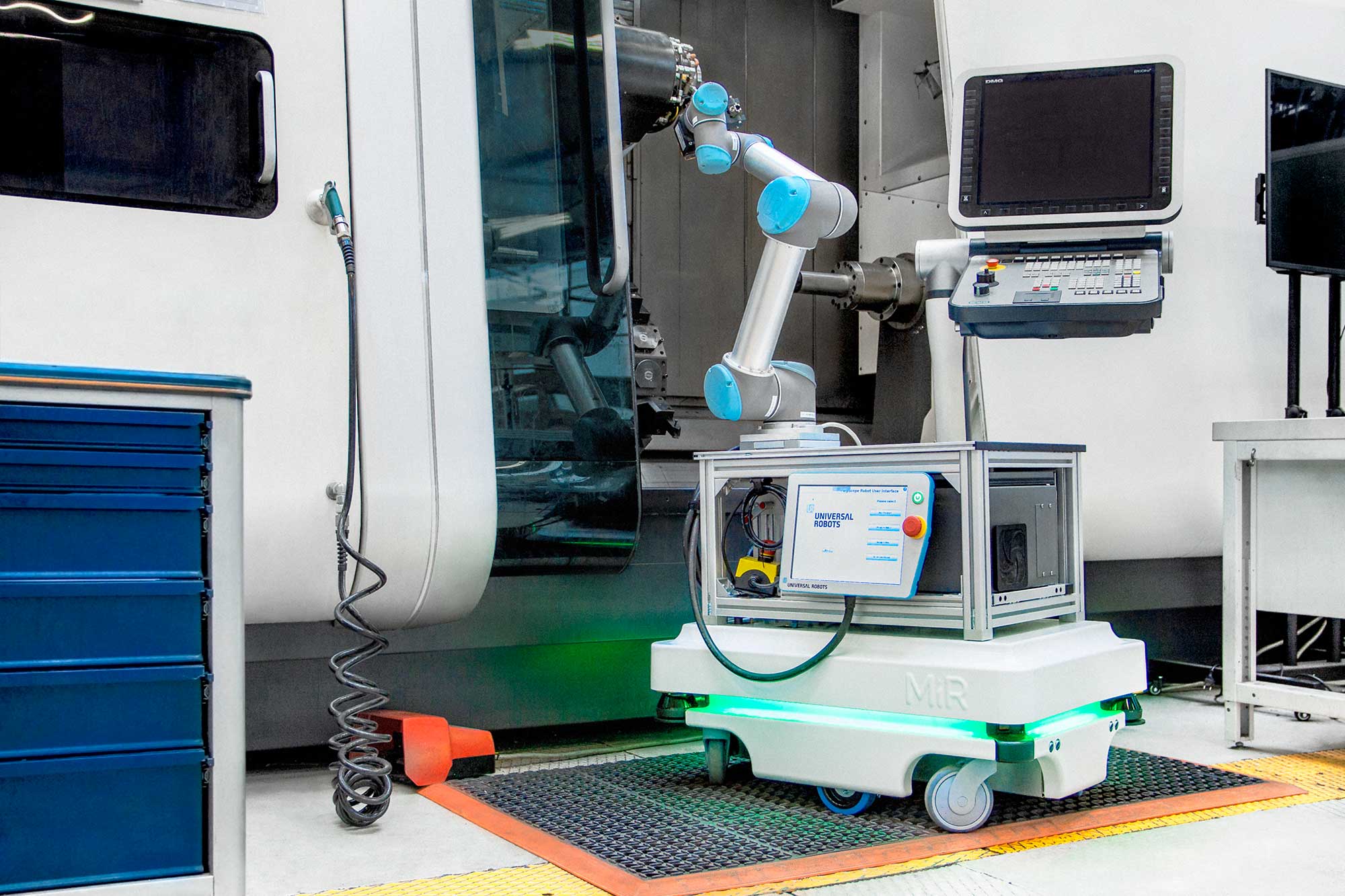
Der Tend-O-Bot-Demonstrator kann vollautomatisch Werkzeugmaschinen beladen.
Neue Potenziale durch automatisierte Einrichtung von Werkzeugmaschinen
Die flexible Verkettung von Maschinen und Anlagen verspricht eine höhere Maschinenauslastung und die Fähigkeit, effizient auf kundenindividuelle Aufträge reagieren zu können. Dazu bedarf es neben der Digitalisierung und Vernetzung von Produktionsanlagen auch einer flexibleren Handhabungs- und Transporttechnik. Insbesondere die Be- und Entladung von Werkzeugmaschinen und Bearbeitungszentren bindet bei vielen produzierenden Unternehmen Personalkapazitäten, die in anderen Tätigkeitsfeldern besser allokiert wären. Am Markt erhältliche Systeme zur automatisierten Maschinenbeladung sind derzeit nur für den Einsatz an stationären Robotern gedacht.
Um den Systemen zusätzliche Bewegungsfreiheit zu verschaffen untersuchen die Forscher des Fraunhofer IPK neue Ansätze zur Kombination aus fahrerlosen Transportsystemen (FTS) und Industrierobotern. Im Rahmen des Projektes Tend-O-Bot sollen verschiedene Werkzeugmaschinen von einem mobilen Robotersystem mit möglichst unterschiedlichen Werkstücken beladen werden. Dabei soll der bislang manuell durchgeführte Einrichtungsprozess des Systems weitgehend automatisiert erfolgen.
Auf schnelle und präzise Bahnplanung des Roboters kommt es an
Das fahrerlose Transportsystem wird mit einem Roboterarm sowie mitgeführten Mehrwertkomponenten kombiniert. Diese Mehrwertkomponenten umfassen eine cloudbasierte Bahnplanungskomponente sowie Kameratechnik und Wechselgreifer. Dieses System ermöglicht das automatische Beschicken von Werkzeugmaschinen mit unterschiedlichen bis hin zu vorab unbekannten Werkstücken ohne eine manuelle und auftragsindividuelle Programmierung des Roboters.
Während der Fahrt werden die Werkstücke mit Hilfe der Kameratechnik vermessen und die Bahnplanung an der Zielmaschine vorbereitet. Diese hängt von der tatsächlichen Positionierung des fahrerlosen Transportsystems vor der Maschine sowie vom jeweiligen Innenraum und der vorhandenen Spannvorrichtung in der Maschine ab. Zur Lokalisierung des FTS relativ zur Maschine sowie zur Vermessung des Maschineninnenraums wird eine Kombination von 2D- und 3D-Kameratechnik verwendet.
Um die Kapazitätsanforderungen der mitgeführten Recheneinheit zu reduzieren, findet die Berechnung der Roboterbewegungen auf ausgelagerten, leistungsfähigen Recheneinheiten (z. B. Edge-Cloud) statt. Durch die zentralisierte Struktur der Robotersteuerung können mehrere Handhabungssysteme gleichzeitig bedient und auch die Fahrtplanung und das Flottenmanagement für die FTS ausgelagert werden. Die Bahnplanung des Roboterarms kann zu verschiedenen Zeitpunkten unterschiedliche Genauigkeitstoleranzen zulassen. Dies erlaubt den frühzeitigen Beginn der Roboterbewegung bereits während der Fahrt des FTS. Während der Annäherung an den Zielpunkt steigen die Anforderungen an die Genauigkeit. Die Toleranzen werden reduziert und die Positionierung des Roboters verfeinert gewährleisten.