Robotic assistance systems
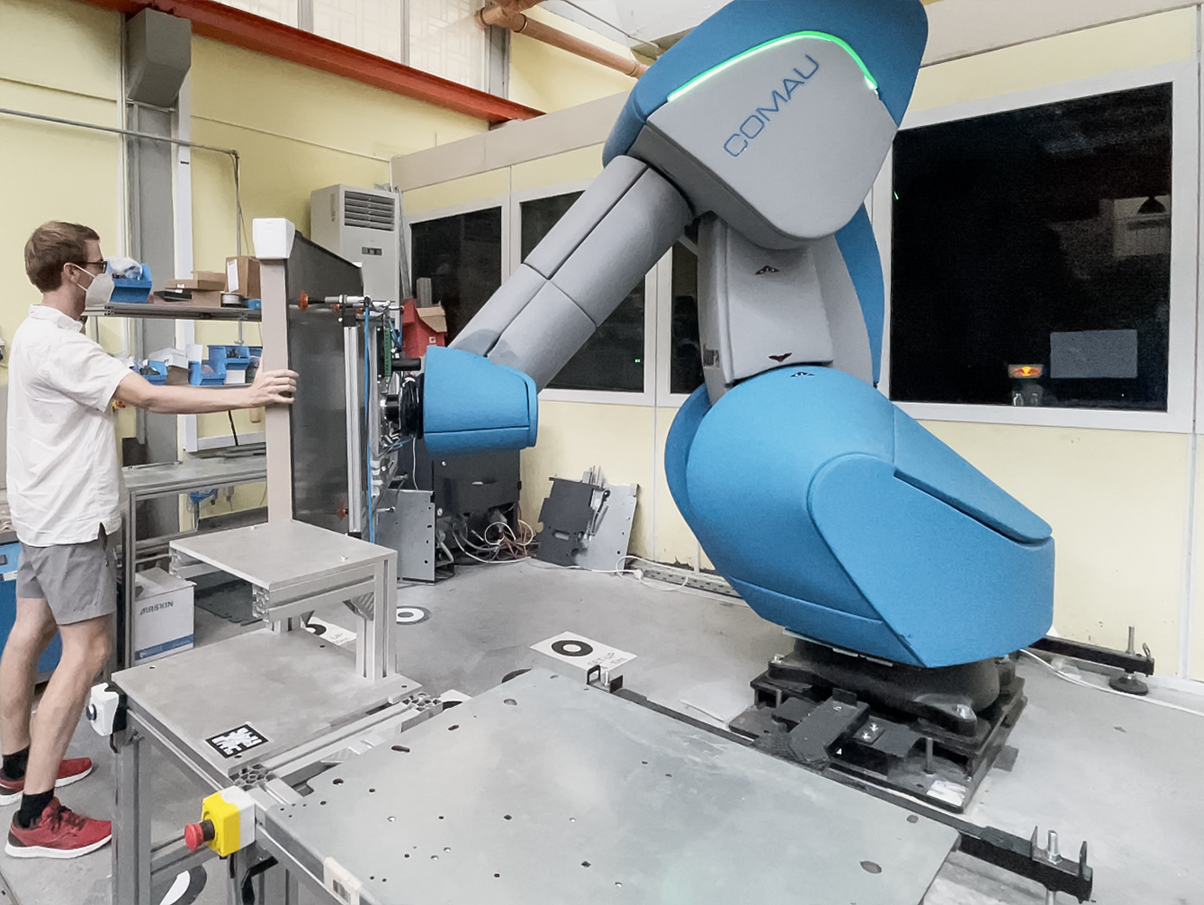
One way to leverage this potential is through direct physical interaction between humans and robots. At Fraunhofer IPK, new generations of robotic systems are being developed that can safely transport loads such as 35 kg packages of solar panels in a human-robot collaboration. Communication between the partners takes place through direct contact. Sensors determine the force exerted by a human on the package, and intelligent algorithms use this information to calculate the intended movement. Deep integration of the system into the robot's control system means that the processes take place within a control cycle, giving the human operator the feeling that the package is attached to a guiding rail along which it can be moved effortlessly. In the SHERLOCK project, researchers are also developing processes that use similar methods to allow simple interaction with robots in order to align components in an ergonomically favorable way.
Robotic support can also be much more discreet: Using a cordless screwdriver to screw components together overhead can fatigue the arm muscles in the long run. The active exosuit PowerGrasp uses compressed air to strengthen and support movements and thus relieve the strain on workers in assembly, as an example for a use case. The system is designed as a textile vest and does not restrict freedom of movement. Thanks to artificial intelligence methods, PowerGrasp recognizes both the type of movement and the degree of fatigue and can provide targeted support.
Artificial Intelligence for more flexibility
Human-robot collaboration also brings new challenges. For example, robots must learn to deal with changes in their environment that are initiated by humans and are thus unpredictable for them. They must therefore be able to detect deviations from a target state and subsequently react to them dynamically. Humans and robots must also be able to assess the current (movement) intentions of their counterparts.
To do this, the machines must become intelligent: Image processing algorithms, for example, make it possible to identify an inaccurately positioned screw and successfully carry on despite a deviation from the planned state. AI cannot only process images and videos, but also movements. For example, the PowerGrasp vest described above contains accelerometer and gyrometer sensors that measure and classify movements. To train the exosuit's artificial intelligence, the researchers first collect a dataset of typical hand movements and activities from the field of mechanical engineering in six-dimensional motion data. Neural networks with time components can not only recognize the activity in this, but also evaluate fatigue states.
Better together
AI plays an important role in enabling technical systems to follow humans. In industrial production, numerous and sometimes very complex tasks can be automated. Not every scenario and every human movement can be anticipated and appropriate actions programmed. Instead, robots must learn to look, listen, feel and thus integrate themselves into the working world of humans. The more real-time information about their working environment is available in the process, the better. To get the most comprehensive picture possible of their environment, robots need »sensory organs« and a »brain«: suitable sensor technology and advanced data and information management.
Vice versa, humans also need support in communicating with machines. Digital assistance systems bridge the boundary between physical and digital worlds and lead to the metaverse advancing ever deeper into production-specific processes. This revolution in collaborative working, which focuses on people and their strengths – their almost unlimited creativity, but also certain fine motor skills – is helping to meet the challenges of today. For example, demographic change is causing an increasing shortage of skilled workers, which is particularly glaring in the technical sector. Aging workers and their invaluable expertise will soon be missing from companies. Virtual assistance systems have the potential to help both qualify new employees and reduce human effort overall.
From the smallest unit of individual humanmachine interaction to large cyber-physical systems – at Fraunhofer IPK these topics are being advanced in many research and development projects. Our researchers are shedding light on important aspects that have often been neglected in everyday industrial life. For them, classic automation expertise goes hand in hand with software development, data management, factory planning and other relevant disciplines. This allows our scientists to transcend the »block thinking« between physical and virtual worlds that is still widespread in industry and thus develop the best possible solutions in the area of assistance systems, for example. In this way, research and development ensures that people have sustainable and useful helpers in robots and other machines in the long term.