
Bolting Cobots
Automating assembly processes at BMW Motorrad is a major challenge due to the highly dynamic environment. In assembly tasks, small parts must be installed flexibly and with fine motor skills. This becomes particularly clear in the example of screw fastening: Identifying the position of a screw on the motorcycle, placing the electric nutrunner correctly, tightening the screw with the necessary torque – this requires complex sensor technology and motor skills in a robot.
Since there are also constantly people present in the production environment, BMW is interested in a flexible automation approach that enables as much human interaction as possible. Conventional robot cells require a very large floor area, and during operation no persons are allowed in the robot's workspace.

Human and machine in the same workspace
Motivated by this initial situation, BMW Motorrad turned to the robotics experts at Fraunhofer IPK in search of a flexible automation solution. Together they developed a solution that consists of a cooperative robot (also called a cobot) with a combination of force control, image processing and a control strategy. This approach enables flexible integration into a dynamic environment.
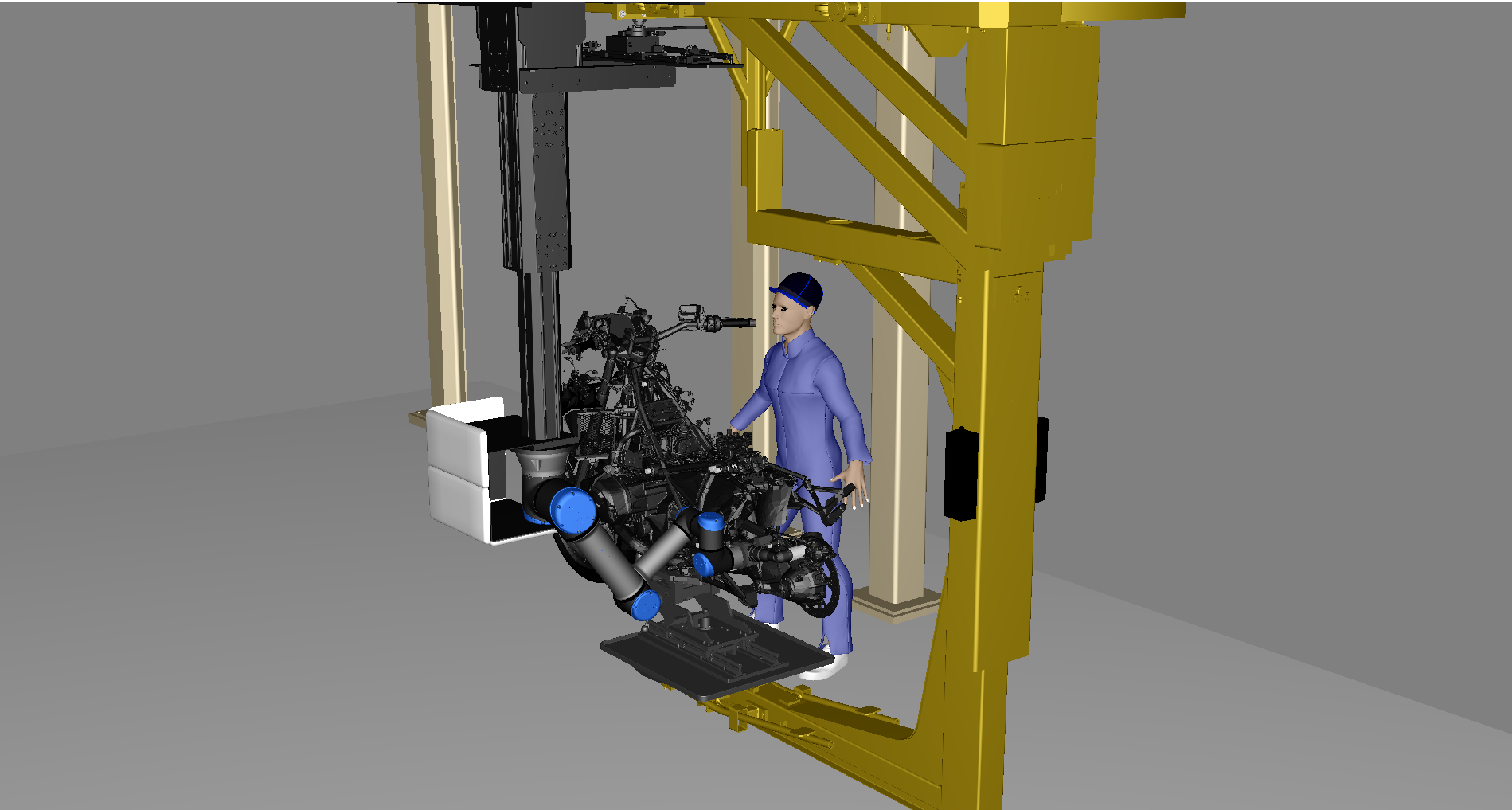
Cobots are designed for close interaction between humans and robots. The robot has an internal sensor system that makes it easier for developers of robotic applications to comply with all relevant safety standards for collaborative robots. This means that traditional safety measures such as protective fencing or light barriers can be dispensed with, and humans and machines can work together in the same workspace. This way, the robotic application at BMW can carry out the bolting process fully automatically, while human employees carry out further work steps in the immediate vicinity – such as quality assurance of further assembly steps on the same product.
Mounting screws reliably
Robot applications with vision systems and machine learning algorithms enable flexible force-controlled screwing in environments that are not completely predictable, whether in flow or cycle operation. The vision module locates the workpiece in the workspace, even if its position is variable. The robot system controller uses force control to detect that contact has been made between the electric nutrunner and screw head, and to keep the contact between them until the screw is fully threaded.
Added value through human-robot collaboration
On the BMW Motorrad side, employees from the technical planning department supported the prototypical implementation of the concept. The technical feasibility was tested directly in the ongoing assembly at the Berlin plant. As one of BMW’s experts states: »Thanks to Fraunhofer IPK's prior experience in combining force control, image processing and a control strategy, we were able to quickly integrate the joint ideas into the existing system, even during series production. This allows us to accurately assess which technologies can be used in our production and bring added value.«
This added value should not be underestimated for the employee and for the workflow. Automation by means of humanrobot collaboration (HRC) eases physically strenuous work and creates free space for other tasks and challenges in manufacturing. It contributes to process improvement and increased efficiency – ultimately making the factory a more smoothly running and more humane work environment.