
Intelligent Machine Tending
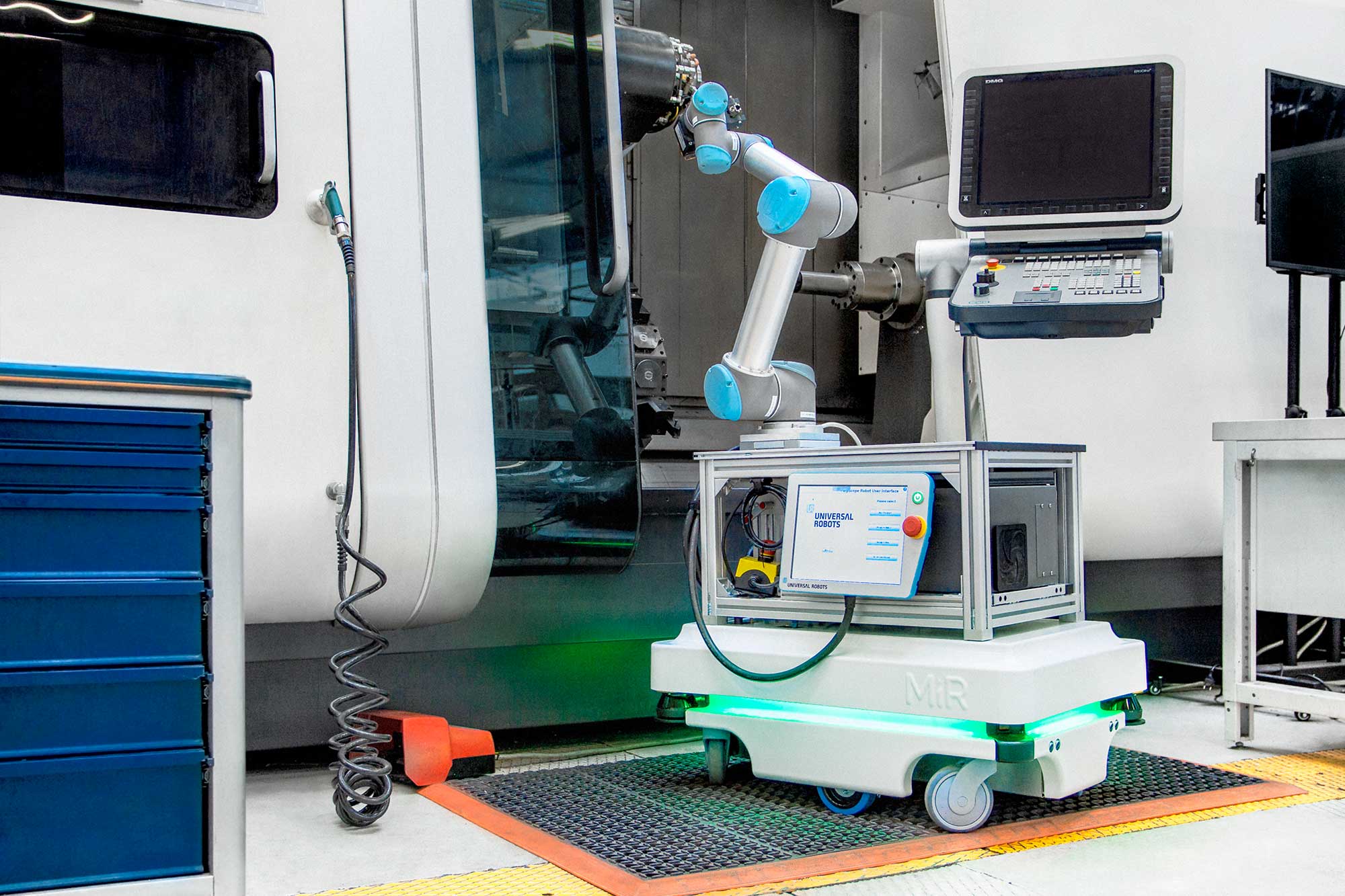
The Tend-O-Bot demonstrator can load machine tools fully automatically.
Imagine the factory of the near future. You are certainly seeing complex, digitally networked machines and systems. The automation degree is presumably quite high and the workers are probably assigned monitoring tasks rather than having to perform physically demanding work. Perhaps the machine tools are also automatically approached and loaded by transport vehicles?
Most of these ideas are already a reality in some places. Only the latter idea, the automatic mobile loading of machine tools, has proved difficult in practice so far. In fact, the loading and unloading of machine tools and machining centers tie up the human resources capacities of many manufacturing companies, which would be better allocated in other activities. The first few systems for automated machine tending available on the market need to be set up manually, which is very time-consuming. They usually perform rigid, pre-programmed motion sequences that are played back step by step. The process of approaching the machines is usually quite slow and the tending processes are not initiated until the transport system arrives at the machine. This step-by-step approach requires a lot of time, during which the machines and systems are not able to work. This results in idle time, thereby reducing production efficiency. Furthermore, the transport routes set up in this way are inflexible, making it difficult to process customer-specific orders.
To provide the systems with additional freedom of movement, a research teamat Fraunhofer IPK is investigating new approaches for combining Automated Guided Vehicles (AGV) and industrial robots. As part of the project Tend-O-Bot, different machine tools are to be loaded with a wide array of workpieces by a mobile robot system. The system’s setup process, which has so far been carried out manually, is to be largely automated.
Faster and more precise
The AGV is equipped with a robotic arm and provides added value with its transport services. This includes a cloud-based path planning component as well as camera technology and interchangeable grippers. This system allows for machine tending with different workpieces without the need to manually program the robot for each individual job. Even when the workpiece is unfamiliar, the robot can place it correctly using its smart equipment.
While being transported, the workpieces can be measured by the cameras and the path planning for the target machine can be prepared. The trajectory planning depends on the actual positioning of the AGV in front of the machine, as well as on the specific internal space and the fixtures inside the machine. A combination of 2D and 3D camera technology is used to locate the AGV relative to the machine and measure the machine’s interior.
In order to keep the capacity requirements of the on-board computing unit low, the calculation of the robot movements is outsourced. It takes place on powerful computing units such as edge clouds. Due to the centralized structure of the robot controller, several units can be operated simultaneously and the path planning and fleet management for the AGVs can also be outsourced. The trajectory planning for the robot arm can allow different accuracy tolerances between different events. This allows the robot to reorient itself while the AGV is still moving. As the robot approaches the target point, accuracy requirements increase. The tolerances are reduced and the positioning of the robot is refined.
This adaptive action during driving replaces the existing step-by-step sequence »programming – driving to destination – executing the defined path«. In addition, AGV can also be used to analyze the workpiece on board using the built-in camera technology, e.g. for quality control.
A demonstrator for the shop floor
As part of the Tend-O-Bot project, a functional demonstrator will be developed, which showcases the novel flexible chain-linking of different manufacturing units. Different requirements of selected pilot customers shall be taken into account in the design of the demonstrator. Cur-rently, the phase of identifying customer requirements is in progress.