
Precision Is Key
Without robots, there is no automation. Whereas industrial robots were previously used primarily for pick-and-place and assembly work, they are increasingly taking over activities from machine tools when flexible manufacturing is called for. The advantages are obvious: Improved motion axes now make it possible to reach any possible position and any orientation, and universal end effectors are compatible with all conceivable tools – be they milling cutters, drills, scanners, or saws. Industrial robots can thus perform increasingly tricky tasks and produce complex components from a variety of materials such as wood, plastics and metals. While the working range of a CNC machine is limited to a few meters, robots can also reach components that are difficult to access. This versatility is a decisive advantage when it comes to producing efficiently and cost-effectively even with small batch sizes and a high number of variants.
Weak Spot: Low Stiffness
And yet, the flexible all-rounders do not come close to the high precision of a machine tool, which, for example, processes metal parts down to the micrometer range. This is because a classic industrial robot – such as the most commonly used six-axis articulated arm robot – has only a comparatively low stiffness. This is mainly due to the fact that the robot arms form a so-called open kinematic chain. During activities with high acting forces, such as milling or forming, the robot structure yields and the desired position is not approached exactly. The resulting tool displacement varies depending on the application, but almost always affects manufacturing accuracy. Accordingly, robots are predominantly used where the high accuracy of a machine tool is not required.
Improving the positioning accuracy of industrial robots – and thus expanding their area of application – has therefore been an important field of research for years. Different approaches are being pursued here, focusing either on the design, the control or the calibration of robots. However, due to the progressive networking of machines and the associated availability of large amounts of data, methods of artificial intelligence, in particular supervised machine learning, are becoming increasingly important.
Predicting Tool Displacement with AI
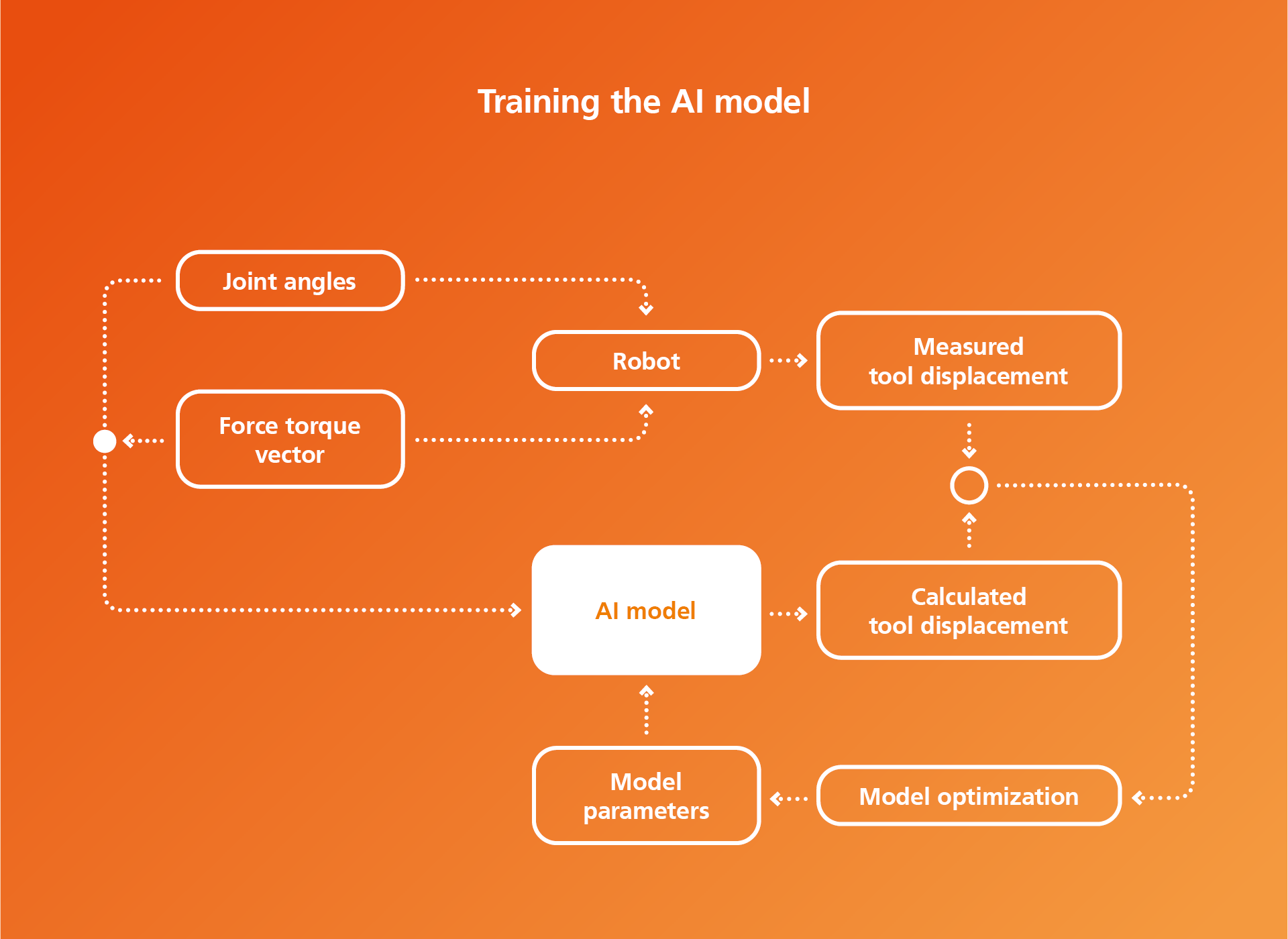
What is special about supervised learning is that the AI model learns based on a data set where the correct answers already exist. So the model receives both inputs and matching outputs. Once the algorithm detects a pattern between these, new inputs can be added, and the AI predicts the outputs.
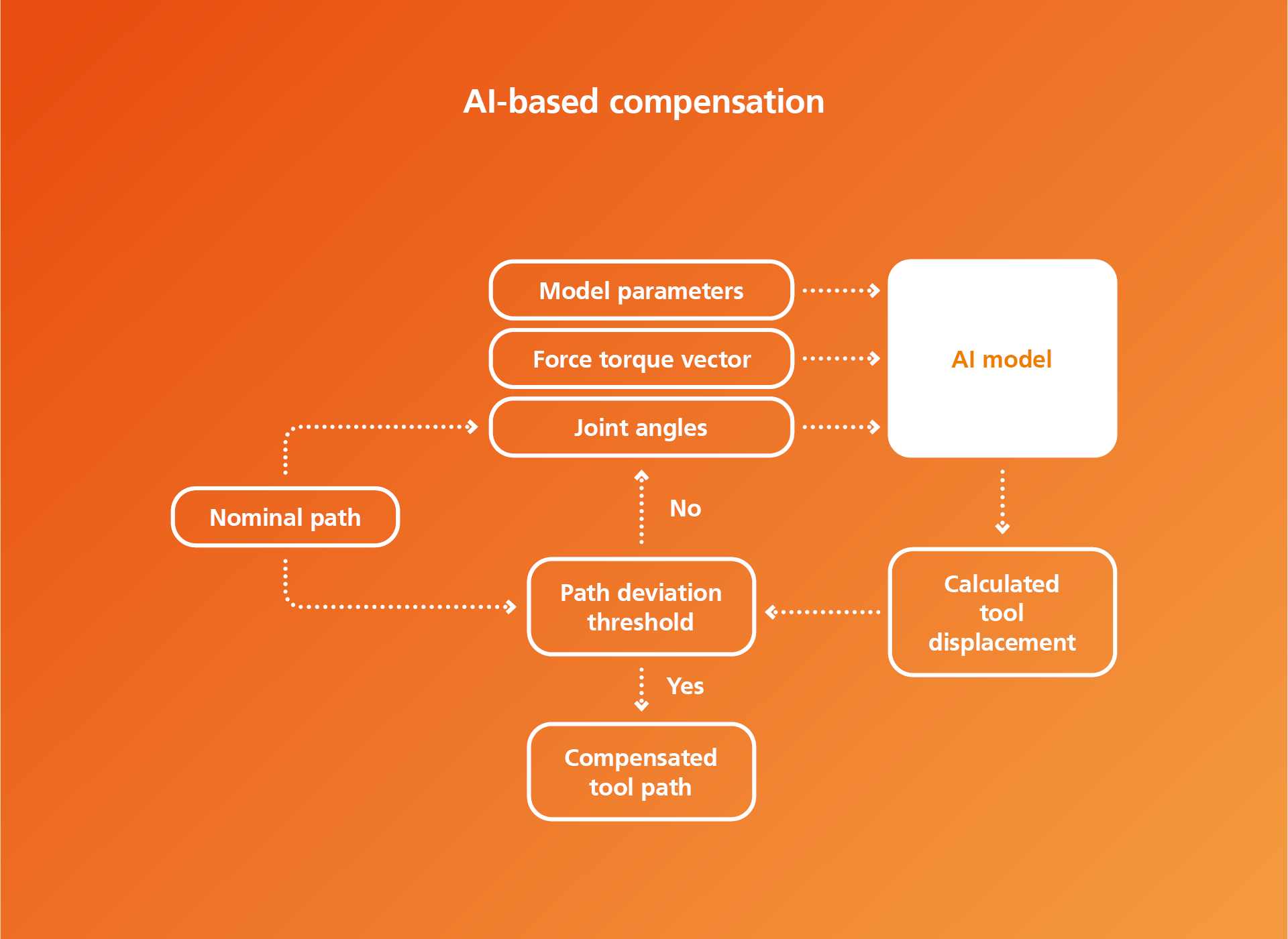
Accordingly, an AI model for predicting tool displacement maps the robot's six joint angles and the force and moment components on the tool as input parameters to the tool displacement as output parameters. Such a trained model can be used to predict tool displacements for any task.
Sheet Metal in Small Quantities
To validate this training method, researchers at IWF of TU Berlin have implemented a so-called incremental hole-flanging process with an industrial robot. Hole-flanging is a tensile pressure forming process in which pre-cutted holes in the sheets are expanded to form a flange. It is part of the process chain for the production of many sheet metal components, for example in automotive engineering. The extension of conventional hole-flanging to include an incremental approach, in which the sheet is expanded step by step by a generic tool along a tool path, enables flexibility to be increased and costs to be reduced by eliminating the need for costly forming tools. The use of industrial robots further enhances this flexibility and also offers the possibility of forming flanges in hard-to-reach areas using novel processes.
How to get Good Data
However, applying high forces as is required in forming causes tool displacements that have an influence on the forming accuracy of the flanges. To predict these displacements using supervised machine learning, the researchers generated a training data set for which an industrial robot was loaded with an air spring on various circular tool paths. The joint angles of the robot without load as well as under the influence of external forces were recorded at several points and each measured with a laser tracker. A total of 352 data points was determined in this way. The tool displacement results from the difference between the loaded and the unloaded position.
Form-Fitting Flanges
The result: The shape accuracy of the flanges improved by 75 percent, corresponding to a decrease in the maximum deviation to 0.6 mm. At the same time, differences between minimum and maximum measured flange diameters were reduced, thereby increasing the roundness of the flanges. The research team has thus impressively demonstrated how using AI compensates for positioning errors in industrial robots and significantly improves product quality. Yet, the developed method is by no means limited to hole flanging: Taking into account other factors such as dynamic parameters and temperatures, work is already underway to qualify industrial robots for any high-precision application in the future.