
Maschinen beladen mit Sinn und Verstand
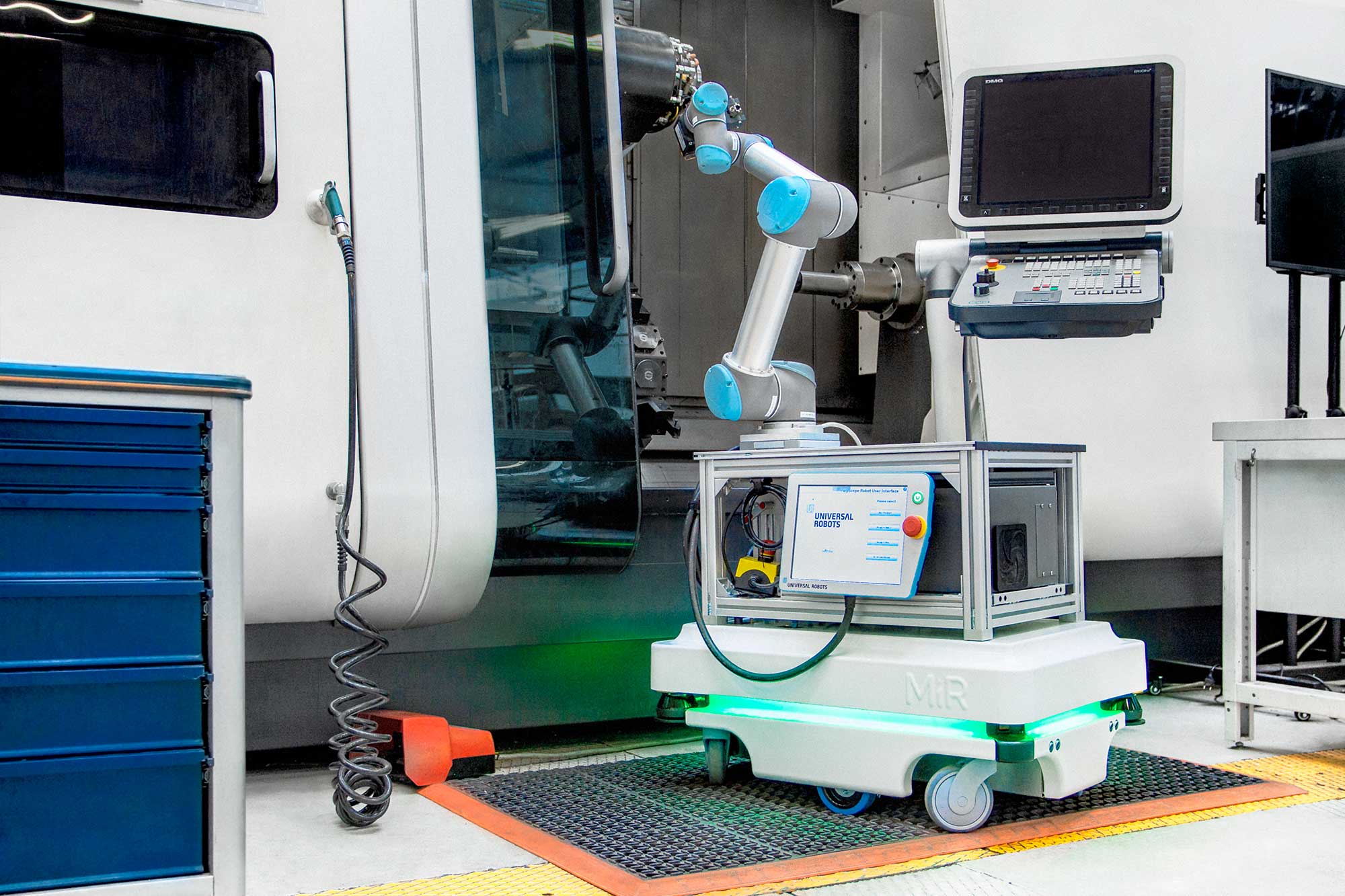
Der Tend-O-Bot-Demonstrator kann vollautomatisch Werkzeugmaschinen beladen.
Stellen Sie sich einmal die Fabrik der nahen Zukunft vor. Sicherlich sehen Sie komplexe, digital miteinander vernetzte Maschinen und Anlagen. Vermutlich ist der Automatisierungsgrad recht hoch, und die Arbeiterinnen und Arbeiter haben eher eine überwachende Funktion, als dass sie körperlich anstrengende Arbeiten verrichten müssten. Vielleicht werden die Werkzeugmaschinen automatisiert von Transportfahrzeugen angefahren und beladen?
Die meisten dieser Vorstellungen sind heute schon mancherorts Realität. Nur die letzte Idee, die automatische mobile Beladung von Werkzeugmaschinen, gestaltet sich bisher in der Praxis schwierig. Tatsächlich bindet die Be- und Entladung von Werkzeugmaschinen und Bearbeitungszentren bei vielen produzierenden Unternehmen heute Personalkapazitäten, die in anderen Tätigkeitsfeldern besser allokiert wären.
Erste am Markt erhältliche Systeme zur automatisierten Maschinenbeladung müssen aufwendig manuell eingerichtet werden und vollführen dann meist starre, vorprogrammierte Bewegungsabläufe, die schrittweise abgespielt werden. Das Anfahren an die Maschinen geschieht meistens recht langsam und die Abläufe des Beladevorgangs werden erst nach der Ankunft des Transportsystems an der Maschine initiiert. Dieses schrittweise Vorgehen kostet viel Zeit, in der die Maschinen und Anlagen nicht arbeitsfähig sind. Das erzeugt Leerlauf und senkt so die Produktionseffizienz. Daneben sind die so eingerichteten Transportwege verhältnismäßig unflexibel, was die Bearbeitung kundenindividueller Aufträge erschwert.
Um den Systemen zusätzliche Bewegungsfreiheit zu verschaffen, untersucht ein Forschungsteam am Fraunhofer IPK neue Ansätze zur Kombination aus fahrerlosen Transportsystemen (FTS) und Industrierobotern. Im Rahmen des Projekts Tend-O-Bot (von engl. machine tending, Maschinenbeladung) sollen verschiedene Werkzeugmaschinen von einem mobilen Robotersystem mit möglichst unterschiedlichen Werkstücken beladen werden. Dabei soll der bislang manuell durchgeführte Einrichtungsprozess des Systems weitgehend automatisiert erfolgen.
Schneller und präziser
Das fahrerlose Transportsystem ist mit einem Roboterarm ausgestattet und hat darüber hinaus einige Mehrwertdienste und -komponenten mit an Bord. Dazu gehören eine cloudbasierte Bahnplanungskomponente sowie Kameratechnik und Wechselgreifer. Dieses System ermöglicht das automatische Beschicken von Werkzeugmaschinen mit unterschiedlichsten Werkstücken, ohne dass der Roboter manuell für jeden individuellen Auftrag programmiert werden muss. Selbst wenn das Werkstück unbekannt ist, kann der Roboter es mithilfe seiner smarten Sensorik korrekt platzieren.
Während der Fahrt können die Werkstücke mithilfe der Kameratechnik vermessen und die Bahnplanung an der Zielmaschine vorbereitet werden. Die Bahnplanung hängt von der tatsächlichen Positionierung des fahrerlosen Transportsystems vor der Maschine sowie vom jeweiligen Innenraum und der Spannvorrichtung in der Maschine ab. Um das FTS relativ zur Maschine zu orten und den Maschineninnenraum zu vermessen, wird eine Kombination von 2D- und 3D-Kameratechnik verwendet.
Um die Kapazitätsanforderungen der mitgeführten Recheneinheit gering zu halten, wird die Berechnung der Roboterbewegungen ausgelagert. Sie findet auf leistungsfähigen Recheneinheiten wie zum Beispiel Edge-Clouds statt. Durch die zentralisierte Struktur der Robotersteuerung können mehrere Handhabungssysteme gleichzeitig bedient und auch die Fahrtplanung und das Flottenmanagement für die FTS ausgelagert werden. Die Bahnplanung des Roboterarms kann zu verschiedenen Zeitpunkten unterschiedliche Genauigkeitstoleranzen zulassen. So kann der Roboter bereits während der Fahrt des FTS beginnen, sich zu bewegen und korrekt zu positionieren. Während der Annäherung an den Zielpunkt steigen die Anforderungen an die Genauigkeit. Die Toleranzen werden reduziert und die Positionierung des Roboters verfeinert.
Diese adaptive Ausrichtung während der Fahrt ersetzt das bisherige schrittweise Vorgehen »Programmierung – Anfahrt – Ausführung der programmierten Bewegung« und spart damit viel Zeit. Darüber hinaus kann die Fahrzeit des FTS auch dazu genutzt werden, das an Bord befindliche Werkstück mithilfe der eingebauten Kameratechnik zu analysieren und beispielsweise eine Qualitätskontrolle durchzuführen.
Ein Demonstrator für die Werkhalle
Im Rahmen des Projekts Tend-O-Bot entsteht ein funktionsfähiger Demonstrator, der die neuartige flexible Verkettung von unterschiedlichen Produktionsanlagen zeigt. Dabei sollen unterschiedliche Anforderungen ausgewählter Pilotkunden in die Gestaltung des Demonstrators mit einfließen. Aktuell läuft die Phase der Erfassung der Kundenanforderungen.